本文目录
01 视频学习
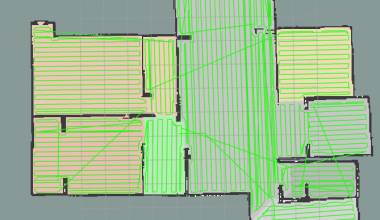
全覆盖路径规划-弓字回字路径原理、开源项目解读、技巧、跑机效果-扫地机商用清洁
https://www.bilibili.com/video/BV11H4y1B7PM/?spm_id_from=333.337.search-card.all.click&vd_source=f465647599ccf892b16a30566894a937
02 佬の笔记
全覆盖路径规划-笔记文档
https://www.yuque.com/tmjtyj/jubjects/bfi5643274ewvlbu#sK0KB
路径优化-笔记文档
https://www.yuque.com/tmjtyj/jubjects/rkexlvs8vs7zrxmi
Clean-robot-turtlebot3原理及流程概括总结
https://blog.csdn.net/qq_44339029/article/details/136880603
03 开源项目
polygon_coverage_planning
https://github.com/ethz-asl/polygon_coverage_planning/tree/master
ipa_coverage_planning
https://github.com/ipa320/ipa_coverage_planning
Complete Coverage Path Planning [CCPP]
https://github.com/RicheyHuang/CoveragePlanner
Full Coverage Path Planning [FCPP]
https://github.com/nobleo/full_coverage_path_planner
Edge Coverage Path Planning [ECPP]
Clean-robot-turtlebot3(佬の课设)
https://github.com/li-haojia/Clean-robot-turtlebot3/tree/master