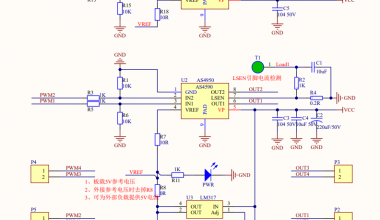
机器人控制 <持续更新>差速小车硬件准备 注意! 本人非专业硬件工程师,我是个臭软件人,硬件的知识也只是没事自己玩玩积累的,所以本文看看就行,当个乐子,别太认真去... Eric2024-09-23 1.02k 0
扫地机器人日志分析工具 2025-12-21 ros2中map_server生命周期立即启动 2025-08-24 spdlog使用方式 C++ 2025-08-12 点云的机器坐标转世界坐标 2025-08-12 C++线程池 ThreadPool 手动实现 2025-06-07 Learning 是否会替代 Planning?以RL为思考 2025-05-25
ros2中map_server生命周期立即启动 2025-08-24 spdlog使用方式 C++ 2025-08-12 点云的机器坐标转世界坐标 2025-08-12 C++线程池 ThreadPool 手动实现 2025-06-07 Learning 是否会替代 Planning?以RL为思考 2025-05-25
spdlog使用方式 C++ 2025-08-12 点云的机器坐标转世界坐标 2025-08-12 C++线程池 ThreadPool 手动实现 2025-06-07 Learning 是否会替代 Planning?以RL为思考 2025-05-25