扫地机器人算法 扫地机器人日志分析工具 本文采用AI设计 针对扫地机器人日志分析训练大模型,目前前沿的思路已不局限于单纯训练一个模型,而是构建一个融合了领域微调... Eric2025-12-21 695 0
Ros ros2中map_server生命周期立即启动 ros2中引入了一些生命周期的东西,本意是好的,但是在写一些demo的时候总是要ros2 lifecycle set /... Eric2025-08-24 635 0
博客 点云的机器坐标转世界坐标 点云的机器坐标转世界坐标:原理与实现(C++/Python) 1. 问题背景 在机器人感知系统中,激光雷达采集的点云数据... Eric2025-08-12 1.08k 0
博客 深入解析UUID:版本差异与生成方式指南 深入解析UUID:版本差异与生成方式指南 什么是UUID? UUID(通用唯一标识符)是一个128位的全局唯一标识符,通... Eric2025-03-29 2.1k 0
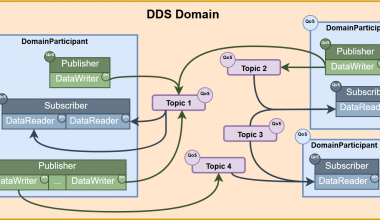
Linux 一口气看完 FastDDS ,耗时666分钟制作 FastDDS 原理 原文:https://fast-dds.docs.eprosima.com/en/latest/f... Eric2024-11-01 6.89k 0
扫地机器人算法 <编辑中>N10 镭射激光雷达 最近入手了一个激光雷达,轮趣家买的,估计是买贵了,下阶段闲的时候可能会玩一玩,就在这篇记录一下 上位机 LSLIDAR_... Eric2024-10-14 787 0
扫地机器人日志分析工具 2025-12-21 ros2中map_server生命周期立即启动 2025-08-24 spdlog使用方式 C++ 2025-08-12 点云的机器坐标转世界坐标 2025-08-12 C++线程池 ThreadPool 手动实现 2025-06-07 Learning 是否会替代 Planning?以RL为思考 2025-05-25
ros2中map_server生命周期立即启动 2025-08-24 spdlog使用方式 C++ 2025-08-12 点云的机器坐标转世界坐标 2025-08-12 C++线程池 ThreadPool 手动实现 2025-06-07 Learning 是否会替代 Planning?以RL为思考 2025-05-25
spdlog使用方式 C++ 2025-08-12 点云的机器坐标转世界坐标 2025-08-12 C++线程池 ThreadPool 手动实现 2025-06-07 Learning 是否会替代 Planning?以RL为思考 2025-05-25