基于Hubery编写的Bspline源码进行实验:hubery05/A-start-with-B-spline (github.com)
A* 部分程序来源:ROS package of A star algorithm (github.com)
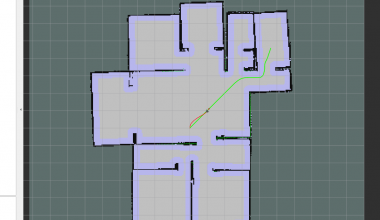
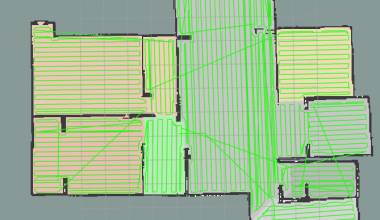
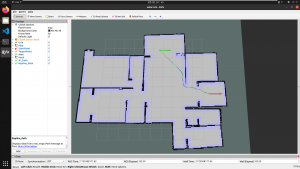
实验效果:
绿色为A*规划的路径,蓝色为Bspline曲线
整理后代码仓库:
Arik/Bspline(https://gitee.com/upcgyl/bspline.git)
基于Hubery编写的Bspline源码进行实验:hubery05/A-start-with-B-spline (github.com)
A* 部分程序来源:ROS package of A star algorithm (github.com)
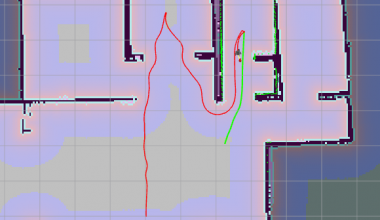
实验效果:
绿色为A*规划的路径,蓝色为Bspline曲线
整理后代码仓库:
Arik/Bspline(https://gitee.com/upcgyl/bspline.git)